在无人机部分,我们首先先花了一段时间将无人机搭建组装起来,并将其能够起飞。然后开始进行树莓派和飞控的链接。
连接方式如下图
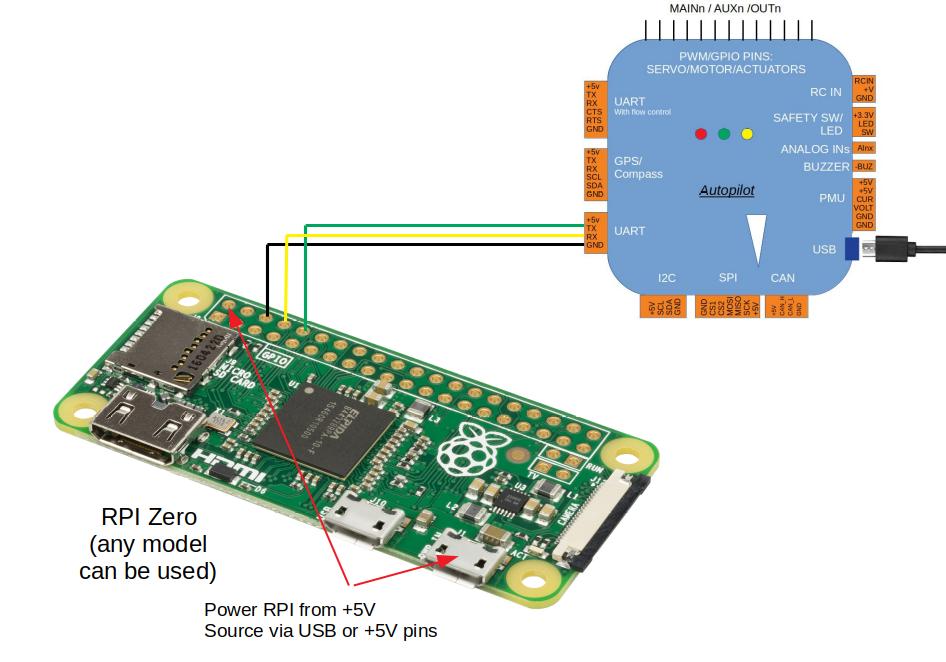
考虑到无人机本身电池给树莓派供电可能有些许不稳定,我们采取了用充电宝给树莓派供电的方式。
然后采用dronekit这个库。这个库可以很好的帮助我们读取无人机的状态,并且可以帮我们控制无人机。
通信部分见Unity3D部分。
前言:因为我们已经得到了助教的一份比较完整的代码,我们想重点实现传输部分,所以我们不想破坏地图的生成和飞机视角,摄像机视角的调整等需要大量数学知识的部分,这样会让事情变得更加复杂,所以我们学习了助教使用的设计模式,按照他们的设计模式来进行我们的作业。
在这次大作业中,我们学会了设计一个大型的程序的时候的一种设计模式:
IOC(Inversion Of Control)模式


设计程序的时候我们会发现,当我们创建一个类的时候,其中很可能声明了另一个具体的类的实例,或者使用了另一个模块,则我们修改某个类(模块)的时候,另一个类(模块)也会发生变化,也就是各个类之间产生了依赖关系,这时候就会让debug变得很痛苦。

控制反转的设计思想是让各个部件解耦,通过一个IoC容器让耦合在一起的部件不在和彼此联系,而一起与一个第三方产生联系。这就可以让你在IoC容器中注入依赖关系,使得依赖关系这个概念独立出来,成为你可以操作的一个对象。
StrangeIoC是一个设计为Unity3D上使用的IOC框架
核心是绑定(Binder),按照作者的说法,我们可以StrangeIoC的确是一个IoC框架,但是它的核心是绑定。
实际上,StrangeIoC提供以下绑定类型:
注入(injection)绑定,反射(reflector)绑定,调度器(dispatcher)绑定
命令(command)绑定,信号(signal)绑定,中介(mediation)绑定,上下文(context)绑定
依赖注入的绑定仅仅是其中一条,除了其IoC特性之外,其他的绑定也有很重要的功能。
例如signal绑定:
commandBinder.Bind<StartSignal>().To<StartCommand>().Once();
这个代码将一个command绑定到一个signal,则signal被dispatch的时候,command被调用,形成一种类似进程间通信的效果(我感觉像是fork之后exec)。
不过在我们的代码中主要是这样使用signal:
Xsignal.Addlistener(method_name);
这样子Xsignal.dispatch之后,method_name()会被立即调用。
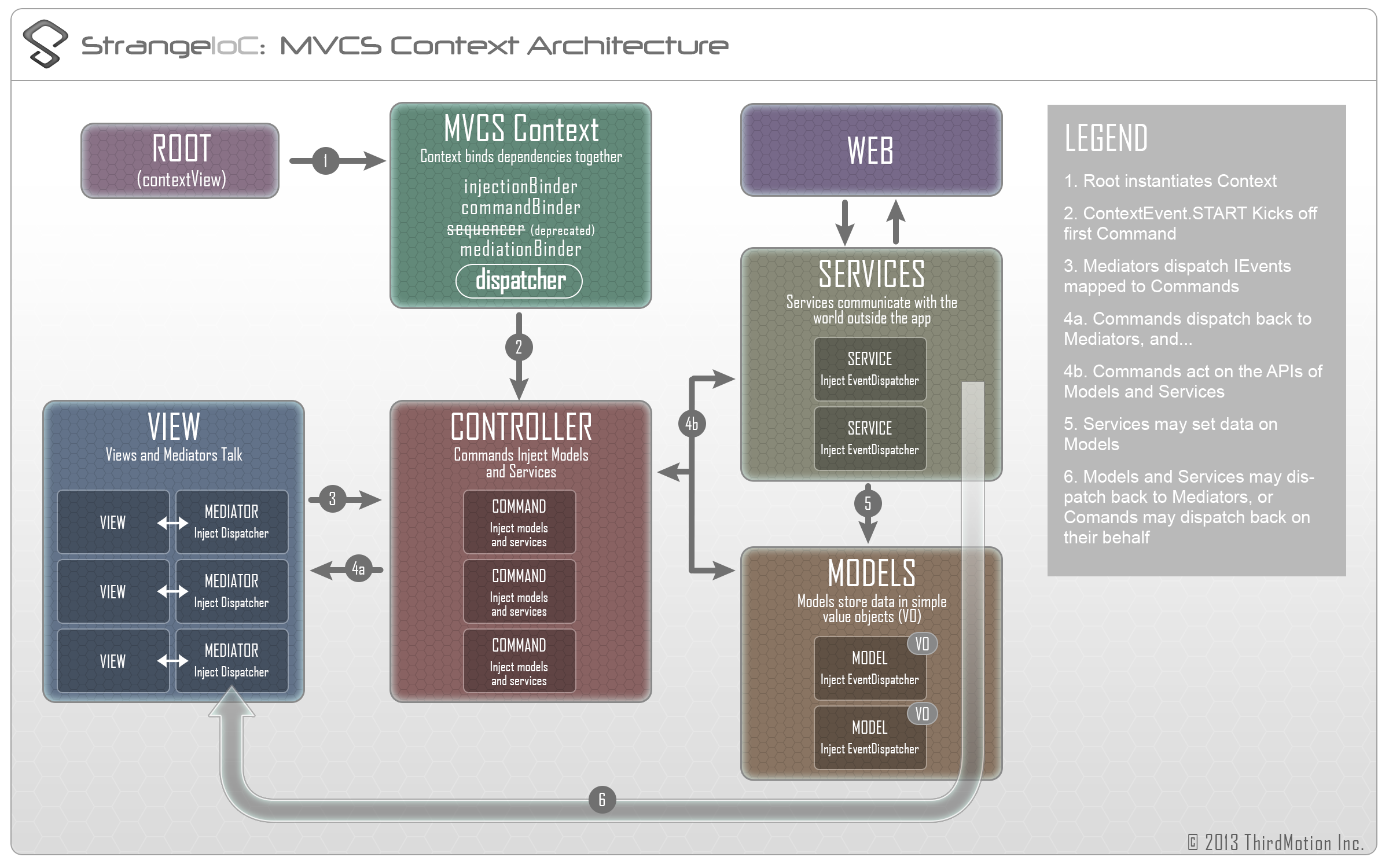
分析我们大作业的需求,我们的重点是上图中的Service,View
我们选择无线串口通信(简单易实现,而且比较稳定)
我们使用多个线程来实现,这样程序各部分才能并行:
读串口:
public class SerialPortService : ICommService
{
[Inject]
public MsgSignal msgSignal { get; set; }
[Inject]
public UpdateAirplaneSignal updateSignal { get; set; }
private SerialPortRead comm;
Thread readThread = new Thread(Read);
……
//线程读数据,把数据记录到dataframe
……
updateSignal.Dispatch(dataframe);//把dataframe用信号发出去,触发View那边的响应
……
}
首先将startcomsignal2(开启程序的时候会执行的一个进程,要求用户提供信息以产生信号,也就是界面的“通信类型”选择那里的用户选择)
commandBinder.Bind<StartSignal>().To<StartCommand>().Once();
commandBinder.Bind<StartCommSignal>().To<StartCommCommand1>();
commandBinder.Bind<StartCommSigna2>().To<StartCommCommand2>();
……
然后在startcommand2里注入IcommService(通过Injection Binder,根据用户选择进行依赖注入)
并初始化它
class StartCommCommand2 : Command
{
[Inject]
public ICommService comm { get; set; }
……
comm.init();
……
Icommservice的接口定义:
public interface ICommService
{
MsgSignal msgSignal { get; set; }
UpdateAirplaneSignal updateSignal { get; set; }
bool init(object[] param);
void dispose();
}
通过把UpdateAirplaneSignal绑定到singleton(),制定updateairplanesignal只有一个单例:
injectionBinder.Bind<UpdateAirplaneSignal>().ToSingleton();
我们可以在airplane里设置一个updatesignal的listener:
public class AirplanePrefabMediator : Mediator
{
[Inject]
public UpdateAirplaneSignal updateSignal { get; set; }
……
public override void OnRegister()//这是strange给mediator类带的一个初始化函数,我们重写它
{
updateSignal.AddListener(updateAirplane);
……
我们实现一个updateairplane方法:
这个方法接收一个DataFrame类型的变量,则我们此时如果updateairplane接收到signal,它会收到通过signal.dispatch( DataFrame X)发送的一个X,这就是它的传入值。
我们已经可以在updateairplane里实现更新View了。
private void updateAirplane(DataFrame revData)
{
……
}
与读信号方向相反,从View(mediator)读取键盘输入,然后通过一个Signal.Dispatch发送出去。
在Service里加一个此信号的Listener,接收到信号做出响应(把信号通过串口写到无人机去)即可。
※读串口和写串口在同一个类中,用信号触发的方式实现,而且串口是临界区,用信号量实现互斥。